Camera Test I
Camera Test II
First UAV Auto 1
Picture Mix



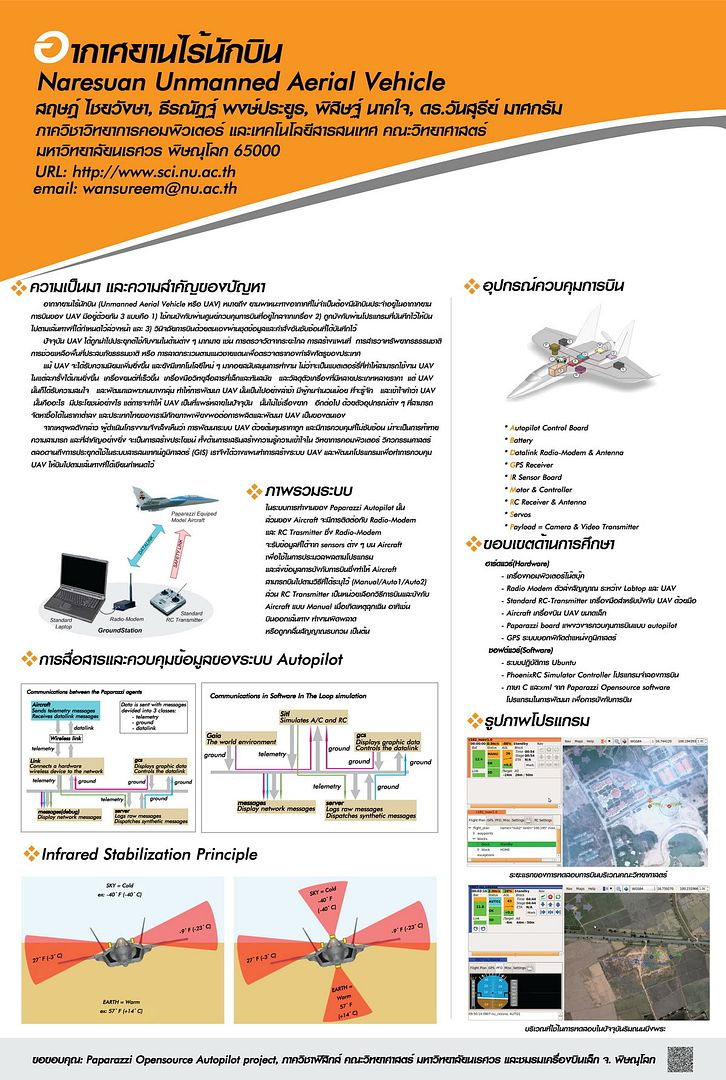
จากภาพ ประกอบไปด้วย
Autopilot Control Board : เป็นตัวส่วนของการบังคับการบินอัตโนมัติ ทำให้เครื่องบินสามารถบินได้ในโหมด 3
Battery : แหล่งพลังงาน
Datalink Radio-Modem & Antenna//ยังไม่ได้กล่าวถึง
GPS Receiver : //ยังไม่ได้กล่าวถึง แต่คิดว่าเป็นตัวรับส่ง สัญญาณ GPS
IR Sensor Board : เป็นตัวช่วยปรับให้เครื่องบิน บินตรง ไม่เอียง มักติดตั้ง ที่ส่วนล่างของเครื่องบิน ใช้หลักการวัดเกี่ยวกับอุณหภูมิในการปรับตำแหน่งของเครื่องบิน ซึ่งจะกล่าวต่อไปภายหลัง
Motor & Controller : ส่วนของการขับเคลื่อน ซึ่งทำให้เครื่องบินเคลื่อนที่ไปข้างหน้าได้
RC Receiver & Antenna : เปรียบเสมือนเสาอากาศ ในการรับส่งสัญญาณกับตัว Controller
Servos
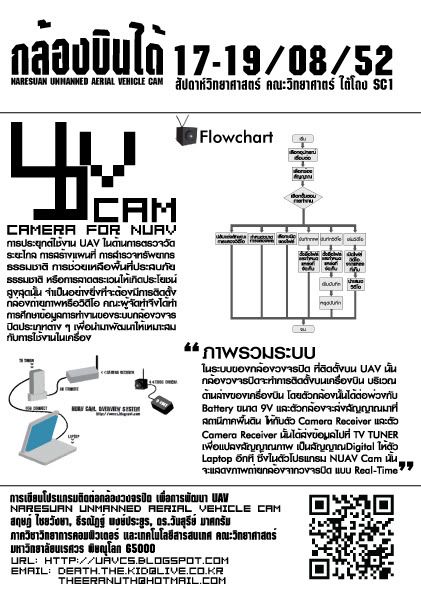
Payload = Camera & Video Transmitter
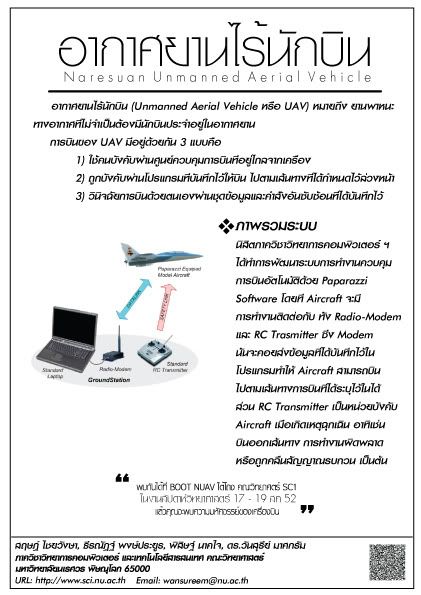
ลักษณะการบิน จะมี ด้วยกัน 3 mode
Mode1: Manual
Mode2:กึ่ง Manual มี IR Sensor ช่วยในการปรับลำเครื่องบินให้ตรง
Mode3:เป็นการบินแบบ Autopilot
Infrared Stabilization Principle

หลักการทำงานของ IR Sensor ใช้หลักการของการ วัดอุณหภูมิ ซึ่งหากมีอุณหภูมิซึ่งมากกว่า หรือน้อยกว่าแล้ว ตัว IR Sensor ก็จะทำการปรับการบินให้อยู่ในลักษณะที่อุณหภูมิ ใกล้เคียงกัน ซึ่งหมายถึงว่า เครื่องบิน อยู่ในลักษณะตรง โดยตัว IR Sensor จะมีอยู๋ด้วยกัน 2 ตัว ตัวนึง มีตัวส่ง Sensor 4 ทิศทาง ใช้ในการวัดอุณหภูมิ และปรับเปลี่ยนการบิน ในทางด้านข้าง คือการเอียงซ้ายหรือเอียงขวา

และตัว IR Sensor อีกตัวหนึ่งเป็นการหา ท้องฟ้า กับพื้นดิน เพื่อปรับลักษณะการก้มเงยของเครื่องบิน
การบ้านของวันนี้ คือ ทำการลง Ubuntu, Paparazzi in Notebook And find detail about fly camera.